Implanty WiFi do mózgu dla rąk robota

Naukowcy od dziesięcioleci badają te sprzężenia mózg-maszyna i w ostatnich latach poczynili imponujące postępy – niektóre z nich opisałem w tamtym artykule. Niesłuszne byłoby jednak pochopne oświadczenie, że naukowcy osiągnęli swój cel. Wystarczy spojrzeć na zdjęcie poniżej, żeby zrozumieć, jak daleko jesteśmy od ideału z science-fiction.

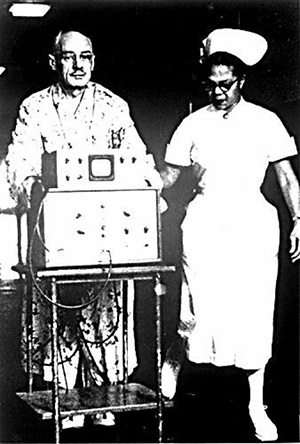
Ta kobieta, Jan Scheuermann, jest na pierwszej linii badań sprzężenia mózg-maszyna. Zgłosiła się na ochotnika i wstawiono jej elektrody do mózgu. Badacze z University of Pittsburgh połączyli te elektrody z kolumnami na szczycie czaszki. Do tych kolumn można podłączyć kable; łączą one komputer z źródłem zasilania.
Scheuermann i naukowcy pracowali razem, żeby nauczyć komputer rozpoznawania sygnałów z jej mózgu i używania ich do kontroli ramienia robota. W grudniu 2012 r. Scheuermann stała się sensacją mediów dzięki tak dobremu kontrolowaniu ramienia robota, że mogła samodzielnie zjeść czekoladę.
Ale były to dopiero początki. Aparatura musi przechodzić przez otwór w czaszce pacjenta, co powoduje zagrożenia infekcją. Kable przywiązują pacjenta do dużych maszyn, co sprawia, że cały system ogranicza zamiast wyzwalać.
Ponadto ramię robota wymaga wielu ulepszeń. Daje siedem stopni wolności. Scheuermann mogła kontrolować jego stawy barkowy, łokciowy i nadgarstkowy. Mogła jednak wyłącznie otwierać i zaciskać dłoń. Miałaby ten sam stopień sprawności przy elektronicznej rękawiczce.
W latach 1960. rozruszniki stały się przenośne i zasilane bateriami. Nadal potrzebowały zewnętrznych kabli, które prowadziły do małego pudełka, dającego się nosić przy pasku. Wreszcie rozruszniki całkowicie zniknęły w ciele. W 2009 r. lekarze zaczęli wszczepiać rozruszniki, które nie tylko miały własne zasilanie, ale mogły także przekazywać lekarzom informację medyczną przez połączenie WiFi z Internetem. Rozruszniki dostarczają także bardziej skomplikowanych sygnałów do serca, używając algorytmów, by dopasować ich rytm. Gdyby ktoś spojrzał na niezdarne rozruszniki w 1960 r. i oznajmił, że są beznadziejne, bardzo by się mylił.
Dwa nowe badania posuwają do przodu sprzężenie mózg-maszyna.
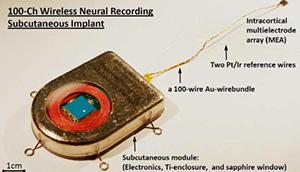
Pierwsze badanie posuwa do przodu elektrodową stronę sprzężenia. Zespół naukowców pod kierownictwem Arto Nurmikko z Brown University skonstruował implant, który nie wymaga żadnych kabli. Implant ten potrafi wychwycić sygnały od 100 różnych elektrod. Zawiera mikroelektronikę, która potrafi zamienić te sygnały w transmisję WiFi w tempie 200 Mb na sekundę. Badacze wszczepili to urządzenie małpom i odkryli, że mogli odbierać sygnały z odległości pięciu metrów, a jakość była równa jakości sygnałów przekazywanych kablami. Małpy swobodnie zajmowały się swoimi sprawami, a naukowcy odbierali sygnały z ich mózgów. Kiedy małpy zasypiały, naukowcy widzieli zmianę fal mózgowych. Cały aparat działa przez dwa dni na podwójnej baterii AA.
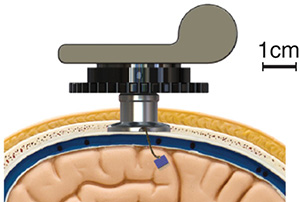
Obecnie to urządzenie będzie prawdopodobnie najbardziej użyteczne dla badaczy zachowań zwierząt. Ale Nurmikko i jego koledzy uczą się także rzeczy przydatnych do następnej generacji sprzężeń mózg-maszyna dla ludzi. Ich inne obiecujące badanie doprowadziło do zbudowania prototypu w pełni dającego się wszczepić urządzenia. Elektrody są w mózgu, zaś źródło energii i przekaźnik mieszczą się na szczycie głowy, pod czaszką. W przyszłości mogą być w stanie zbudować nowe urządzenie, które wykorzystuje oba badania – implant, który może być ukryty w głowie, przekazywać bezprzewodowo mnóstwo danych, działać na długotrwałej baterii i nie rozgrzewać się, jak to czasem robi elektronika.
Tymczasem po drugiej stronie sprzężenia Scheuermann wypróbowuje nowe, ulepszone ramię robota. Zespół z Pittsburgh zaprogramował cztery różne pozycje, jakie może przyjąć dłoń, takie jak uchwycenie kciukiem i palcem wskazującym. Badacze nie wiedzą, czy ich sprzężenie poradzi sobie z tymi wszystkimi dodatkowymi stopniami wolności. Czy potrafi wychwycić sygnały z mózgu Scheuermann, które będą wystarczająco jasne, by w pełni używać zasięgu ruchów ramienia robota?
Aby wyszkolić Scheuermann, naukowcy kazali jej ćwiczyć z wirtualnym ramieniem robota, którego używa do chwytania wirtualnych obiektów na ekranie komputera. System komputerowy nauczył się, jak odczytywać pewne wzory sygnałów neuronalnych jako rozkazy do zmiany ruchów dłoni robota. Równocześnie mózg Scheuermann stał się sprawniejszy w kontrolowaniu ramienia robota, wytwarzając silniejsze sygnały. Wreszcie naukowcy poprosili Scheuermann, by spróbowała podnosić kilka różnych obiektów. Oto próbka jej sukcesów:
Tak jak naukowcy mieli nadzieje, Scheuermann nauczyła się obsługi swojej nowej ręki. Nie była to doskonała edukacja. Czasami nie udaje jej się chwycić obiektu i nigdy nie udało się naukowcom sfilmować sukcesu w wykonywaniu pewnych zadań, jak przelewanie wody z jednej szklanki do innej.
Niemniej rezultaty są zachęcające, a czasami intrygujące. Naukowcy odkryli, że niektóre grupy neuronów odpalały razem w wyraźnych wzorach, kiedy Scheuermann poruszała ramieniem robota we wszystkich dziesięciu możliwościach. Innymi słowy, neurony nie były ograniczone tylko do zginania łokcia lub ściśnięcia kciuka i palca wskazującego. W przyszłości może będzie możliwe wykorzystanie tych elastycznych sygnałów do nadania ramieniu robota jeszcze większej biegłości i lepszego wypełnienia luki komunikacyjnej.
Wifi brain implants for robot arms
The Loom, 16 grudnia 2014
Tłumaczenie: Małgorzata Koraszewska

Carl Zimmer
Wielokrotnie nagradzany amerykański dziennikarz naukowy publikujący często na łamach „New York Times” „National Geographic” i innych pism. Autor 13 książek, w tym „Parasite Rex” oraz „The Tanglend Bank: An introduction to Evolution”. Prowadzi blog The Loom publikowany przy „National Geographic”.