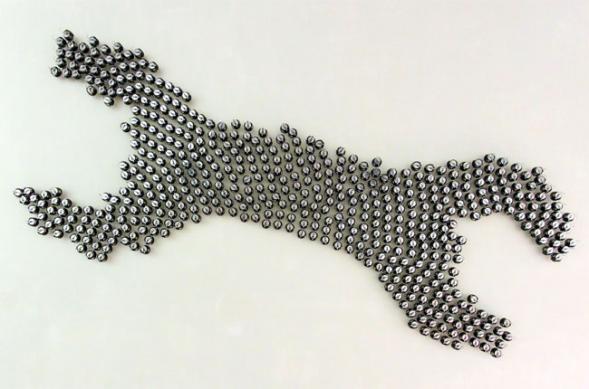
Tysiąc współpracujących, samorganizujących się robotów

Nadal jeszcze daleko im do robotów z komiksów mojego dzieciństwa; porządkują się w kształty dwuwymiarowe, zamiast składać się w stylu Voltrona w rzeczywiste obiekty. Są jednak imponującym osiągnięciem. “Jest to nie tylko największy rój robotów na świecie, ale także znakomity materiał do testowania, który pozwala nam na potwierdzenie w praktyce algorytmów stada” – mówi Roderich Gross z uniwersytetu w Sheffield, który kupił 900 takich robotów do użycia we własnych eksperymentach.
“To osłupiająca praca” - dodaje Iain Couzin, który bada zbiorowe zachowania zwierząt w Princeton University. “Pokazuje wizję przyszłości, gdzie grupy robotów tworzą struktury na żądanie, jak na przykład w niebezpiecznych środowiskach w akcji poszukiwawczo ratowniczej, lub nawet tworzą miniaturowe roje wewnątrz organizmu do wykrycia i leczenia choroby”.
Muszą też być tanie. Wymyślne części mogą dodać mocy każdemu botowi, ale koszty roju rozwalą budżet. Nawet koła zostały wykluczone. Zamiast tego zespół użył prostych silników wibracyjnych. Jeśli położysz telefon na stole i wibruje on, również nieco się przesunie; w ten sposób poruszają się Kiloboty. Mają dwa silniki: jeśli jeden wibruje samodzielnie, robot obraca się; jeśli oba wibrują, posuwa się prosto.
No cóż, w miarę prosto. Tyrania obniżania kosztów oznaczała, że zespół musiał porzucić wszystkie czujniki, które mogłyby powiedzieć robotowi, w jakiej jest pozycji. Nie mogą one powiedzieć, gdzie są, ani czy posuwają się prosto. Każdy jednak może wypuścić promień podczerwieni na powierzchnię pod sobą i wyczuwać promienie odbijające się od sąsiadów. Mierząc jasność promieni, może wyliczyć odległość od innych Kilobotów.
Ta kombinacja ruchu bez kół i przytępionych zmysłów znaczy, że każdy robot kosztuje tylko 20 dolarów. Znaczy także, że „roboty są nawet bardziej ograniczone niż oczekiwaliśmy – mówi Rubenstein. – Można im powiedzieć, żeby się poruszyły, a one się nie poruszają i nie mają pojęcia, że się nie poruszają”.
Na szczęście mają siebie wzajemnie. Zablokowany Kilobot samodzielnie nie może powiedzieć, czy jest zablokowany, ale może komunikować się z sąsiadami. Jeśli myśli, że porusza się, ale odległość od jego sąsiadów zmienia się, potrafi wywnioskować, że coś się nie zgadza. A jeśli sąsiedzi oceniają dystans między sobą i używają przeciętnej, mogą wyrównać indywidualne błędy.
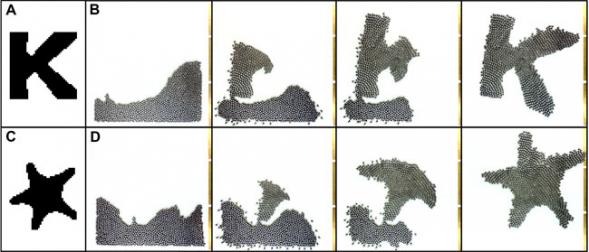
Na podstawie tych zasad zespół stworzył prosty program, który pozwala robotom na samodzielne układanie się w różne kształty, używając tylko trzech zachowań. Pierwsze, posuwają się tylko przemieszczając się wzdłuż obrzeży grupy. Drugie, tworzą gradienty jako przybliżony sposób notowania swojej pozycji w roju. (Robot nominowany jako źródło otrzymuje wartość 0 gradientu. Każdy sąsiadujący z nim robot widzi to i ustala swoją wartość gradientu na 1. Każdy robot, który widzi 1, ale nie widzi 0 ustawia swój gradient na 2, itd.) Wreszcie, chociaż nie mają GPS, mogą dokonywać pomiarów triangulacyjnych i ustalać swoją pozycję przez rozmawianie z sąsiadami. Jak długo zespół nominuje niektóre roboty jako rozstawionych zawodników, w praktyce zamieniając ich w punkty zerowe na niewidzialnym wykresie, reszta roju może wyliczyć, gdzie się znajduje.
Każdy Kilobot działa na tym samym programie. Zespół musi tylko podać im kształt i nominować cztery z nich jako rozstawionych zawodników. Kiedy to jest zrobione, reszta powoli wypełnia właściwy wzór we wzruszająco podobny do życia sposób. Zabiera im to około 12 godzin, ale robią to bez żadnej ludzkiej interwencji. I chociaż końcowe kształty zawsze są trochę wypaczone, także one przypominają życie. Mrówki Solenopsis nie mają platońskiego ideału, jak powinien wyglądać most lub tratwa; po prostu pracują razem z sąsiadami, żeby wykonać zadanie.
Naukowcy od dawna potrafili symulować olbrzymie roje podobnych do żywych cząstek wirtualnych przy pomocy bardzo prostych reguł. Rzeczywisty świat jednak pełen jest uprzykrzonej fizyki, niewygodnego szumu i kapryśnych zespołów obwodów elektrycznych. Nie wszystko działa zgodnie z planem. Budując jednak rzeczywisty rój, zespół może zająć się tymi problemami i stworzyć solidniejsze programy. Już mieli do czynienia z popsutymi silnikami, zamierającymi robotami, kolizjami i korkami w ruchu. „Im więcej razy je uruchomiamy, tym większe prawdopodobieństwo pokazania się czegoś losowego, czego nie spodziewamy się – mówi Rubenstein. – To jest problem z tysiącem robotów: nawet rzadkie wypadki mogą zdarzać się bardzo często”.
Następnym krokiem będzie zbudowanie robotów, które samoorganizują się przez przyczepianie się jeden do drugiego, mówi Marco Dorigo z Wolnego Uniwersytetu w Brukseli. „Robiliśmy to z dziesiątkami robotów. Nie będzie to łatwe z tysiącem”. Rubenstein zgadza się: “Fizyczne połączenia są zawsze trudne. Kiedy masz połączenie, projektujesz resztę robota wokół połączenia. To ma olbrzymi wpływ”.
Z czasem chce także dotrzeć do sytuacji, w której robot może wyczuwać swoje środowisko i odpowiednio reagować, zamiast tylko wślizgiwać się na z góry ustalone miejsce. Jak mrówki, kiedy docierają do wody, nie potrzebują obrazu mostu; po prostu układają się w most. „To jest zupełnie inny poziom inteligencji i nie całkiem rozumiemy, jak to zrobić w robotyce – mówi Rubenstein. – Ale przyroda robi to dobrze”.
Źródło: Rubenstein, Cornejo & Nagpal. 2014. Programmable self-assembly in a thousand-robot swarm. http://dx.doi.org/10.1126/science.1254295
A Swarm of a Thousand Cooperative Self-Organising Robots
Not Exactly Rocket Science, 14 sierpnia 2014
Tłumaczenie: Małgorzata Koraszewska

Ed Yong
Mieszka w Londynie i pracuje w Cancer Research UK. Jego blog „Not Exactly Rocket Science” jest próbą zainteresowania nauką szerszej rzeszy czytelników poprzez unikanie żargonu i przystępną prezentację.
Strona www autora